次世代ロボット開発を加速するスマートアクチュエータシステム THK株式会社
2013年7月、宇宙飛行士による船外活動を支援、代行するロボットの開発プロジェクト「REX-J」が完了した。このプロジェクトにおいてロボットハンド開発の中核を担ったTHKは、「スマートアクチュエータシステム」でロボット技術の進化を狙う。
宇宙環境で人と同等の動作をさせることの難しさ
宇宙空間でロボットが宇宙飛行士の代わりを務めるためには、宇宙飛行士と同様に、各種の機器や工具類を操作できるよう、人間と同程度の握力、安定性、正確性が求められる。
さらに、作業の幅を広げるためには、作業内容に応じてロボットの手首より先のハンド部分を取り外し、作業内容に合ったハンドに交換ができることが望ましい。
これまで、ロボットハンドで強い握力を実現するためには、強い力を出せる大型のアクチュエータ*や駆動制御回路をロボットの腕や肩、胴体などといった比較的スペースのある部分に内蔵することが一般的であったが、それらのアクチュエータをいかにして小型化してロボットハンドに内蔵し、かつ人と同じ動作ができるほどの握力を有するような宇宙用ロボットハンドを開発するか――それがTHKに与えられたミッションだった。
筋肉の動きを模倣する
電気駆動式のロボットハンドは、回転モータとアクチュエータの組み合わせで動くしくみだが、各関節にモータを配置することが必要となるため、部品が多くなり大型化してしまう。
さらに、コストや消費電力という点でも課題が残る。
そこでTHKが考えたのは、人間の筋肉の収縮と同じ直線運動を真似ること。
LMガイドをはじめ、直動機構に強い自社の強みをさらに発展させ、ボールねじを利用した直動アクチュエータを開発したのだ。
指にボールねじを組み込むことでモータの回転運動を直線運動に変換し、小型でありながら30kgという人間並みの握力を達成した。
その後、ロケット発射時のすさまじい重力や−50°Cという超低温環境など、地上との数々の違いから生まれる課題をクリアしたこのロボットハンドは、2012年に宇宙に打ち上げられ、無事ミッションを終了した。

中核技術に込められたもう1つのコンセプト
今回THKが開発したロボットハンドで使われている直動アクチュエータには、もう1つの機能が組み込まれている。
それは、次世代ロボットを構築するための統合システム「SEED」だ。
これまでの産業用アクチュエータは、堅牢性・汎用性が高いものの敷居が高く、扱うには熟練した知識が必要で、また大型で多くの配線を有するため、人と共存する環境で活躍するような次世代ロボットに組み込むには不向きだった。
よって、次世代ロボットを開発するためにはベース環境を一から開発するために多くの労力がかかっていた。
THKが開発したSEEDには、次世代ロボット向けの要素部品が統合的にラインアップされており、これらを組み合わせることで、用途に合わせた多様なロボットを作り出すことができる。
SEEDで、ロボット分野におけるベース環境を整え、次世代ロボットの開発を加速しようというのだ。
センサ・アクチュエータ・OSを統合するシステム
SEEDは3つの機能により構成されている。
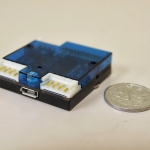
1つ目 はマッチ箱サイズの小型通信コントローラドライバ「SEED-Driver」。単体で小型の直動アクチュエータを 動かすメインコントローラの役割を担うことができ、さらに、CAN通信によって他のモジュールと相互通信することもできるのだ。
2つ目は、SEED以外のシステムと接続、制御するためのコンバータ「SEED-MS」だ。
ロボットは直動アクチュエータ以外にも様々なモジュールが組み合わさって構成されている。
SEED-MSではC言語ベースでライブラリを改変することができ、既存の様々なデバイスと通信することができる。
3つ目がPCとの間のCAN通信、A/D、Dio等の入出力機能を名刺半分のサイズに凝縮した「SEED-PC」。
これにより、PCベースのOSやロボット向けアプリケーション、開発環境、USB機器、インターネット環境をロボット本体に組み込むことができる。
つまり、これら3つの機能を持つSEEDシステムを利用することで、ロボットの統合環境が整い、インターフェースを統一させることができるため、開発をスマートで簡単に行うことができる。
THKが開発したSEEDは、本格的な次世代ロボットの開発のハードルを下げるだろう。
さらに、SEEDによって促進されるのはロボット開発だけではない。
大学や高等専門学校などに教育用に導入されれば、エンジニア育成も進むはずだ。次世代のロボットをつくるのは、きっと、SEEDで開発技術を学ぶ未来のエンジニアたちなのだ。
■ SEED、ロボットハンドに関するお問い合せ
THK 株式会社 技術本部 事業開発統括部
所在地:〒144-0033 東京都大田区東糀谷 4-9-16
T E L:03-5735-0227
F A X:03-5735-0229
E – m a i l:[email protected]
U R L:http://www.thk.com/jp